
Renaud Ronsse
SST/EPL Louvain School of Engineering (EPL)
SST/IMMC Institute of Mechanics, Materials and Civil Engineering (iMMC)
SSS/IONS Institute Of NeuroScience (IoNS)
SST/IMMC/MEED Mechatronic, Electrical Energy, and Dynamic Systems (MEED)
 | Renaud Ronsse Professor Institute of Mechanics, Materials and Civil Engineering Institute of Neuroscience Louvain Bionics UCLouvain, Belgium |
Human-centered robotics
Highlights
| 
|
Research keywords
- Lower-limb prostheses, rehabilitation robotics, human-robot interactions, biomechanics of swimming and flying, humanoid robotics, locomotion, motor control.
Short Bio
- 2011 - ... : Assistant Professor (2011-1018), then Professor (2018-...) at UCLouvain (Belgium), Institute of Mechanics, Materials and Civil Engineering and Louvain Bionics.
- 2009 - 2010: Post-doctoral Fellow at the Ecole Polytechnique Fédérale de Lausanne (Switzerland), Biorobotics Laboratory
- 2007 - 2009: Post-doctoral Fellow at KU Leuven (Belgium), Motor Control Laboratory
- 2007: PhD at ULiège (Belgium), Department of Electrical Engineering and Computer Science. Thesis: Rhythmic Movements Control: Parallels between Human Behavior and Robotics
Archives
- January 2021: Minisymposium on “challenges for adaptive control and sensorimotor restoration in bionic prostheses”.
- October 2017: Mini-symposium about “technology and neurorehabilitation”.
- August 2017: Mini-symposium about “bio-inspired robotics”.
- June 2017: Co-organizer of a workshop about "Human-robot synchronization for assistive technologies" at the International Conference on Rehabilitation Robotics, 2017.
- January 2017: Kick-off of the EU-H2020 CYBERLEGs++ collaborative project.
- June 2016: Mini-symposium about “robotics and motor control”.
- April 2016: Interview in "Questions Clés" (La Première, RTBF radio) about the future of robotics.
- November 2015: participation to the TV program "Il était une foi" (CathoBel) about "robotics to serve humans".
- March 2015: our lower-limb prosthesis has been featured in "tout s'explique" (RTL-TVI).
- March 2015: after the last review meeting, the CYBERLEGs project is now finished. We made quite a buzz in the media (see e.g. Le Soir and RTBF in Belgium, and also the international press cover).
- November 2014: Member of the "Louvain Bionics" consortium.
- November 2013: Interviews in “Le Bar de l’Europe” (TV5) and "La Libre Belgique" (1 and 2) to feature the WALK-MAN project.
- September 2013: Kick-off of the EU collaborative project WALK-MAN.
- April 2013: Interview for La Libre Belgique about humanoid robotics.
- October 2012: Co-organizer of the 5th International Workshop on Human-Friendly Robotics (Brussels).
- October 2012: Co-organizer of a workshop on "Cognitive Neuroscience Robotics" at the IEEE/RSJ International Conference on Intelligent Robots and Systems (2012).
- March 16th, 2012: Co-organizer of a symposium about Neuroscience and Rehabilitation in Brussels. Speakers: Alan McComas, Dick Stegeman, and Dirk Lefeber.
- February 2012: Kick-off of the EU collaborative project CYBERLEGs.
- December 19th, 2011: Visit of Dagmar Sternad (Northeastern University). Two talks: Rhythm 'n' Moves - a Window
Into Brain and Behavior (11:15, Brussels) / Human Motor Performance: Exploiting Stability, Channeling Variability, and Optimizing Safety Margins (16:15, Louvain-la-Neuve) - Co-organizer of a workshop about the "Physiological Principles of Locomotion required for Robot Design" at the International Conference on Rehabilitation Robotics, 2011
Degrees
| Year | Label | School |
|---|---|---|
| 2002 | Ingénieur civil électricien | Université de Liège (Belgique) |
| 2004 | DEA Electrical Engineering and computer science | Université de Liège (Belgique) |
| 2007 | Docteur en sciences de l'ingénieur | Université de Liège (Belgique) |
![]() orcid.org/0000-0003-0823-9633
orcid.org/0000-0003-0823-9633
https://www.researchgate.net/profile/Renaud_Ronsse
Research highlights
 |  |  |
| active ankle prosthesis | bio-inspired humanoid walking | rhythmic training after stroke and Parkinson Disease |
Research statement
My team is invloved in the fields of human-centered robotics and biomechanics (human and animal). More precisely, we conduct research in:
- Design of assistive and rehabilitation robots, mainly for the lower-limb.
- Control and validation of human-robot devices for assistance and rehabilitation of movements.
- Biomechanics of swimming and flying animals.
Assistive and rehab robots are designed for people suffering from various types of movement disorders. For people missing a limb (i.e. amputees), we design efficient active prostheses, i.e. devices capable of providing active power. For people with intact limbs but having higher disorders in the sensori-motor chain (e.g. after a stroke or Parkinson Disease), we design of efficient and intuitive orthoses and exoskeletons.
|  |
Our group is also active in developing innovative high-level controllers for such devices, and in validating them. This implies addressing research questions like:
- What are the (neural) principles governing human locomotion?
- Can we transpose these principles to rehab and assistive devices?
- What are the fundamental differences between discrete and rhythmic movements?
- Does it bring an impact for rehab?
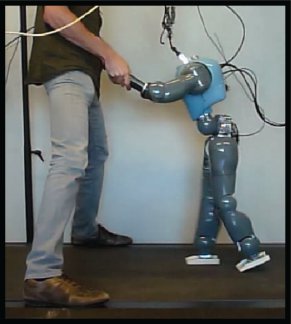
| Interestingly, principles of human locomotion can be investigated with humanoid robots. Indeed, these robots can be used as platforms to test hypotheses about human behavior, and thus to make robots being able to display the same agility and learning skills as humans. In this context, we tested new ideas of locomotion control on the COMAN robot, in the framework of the collaborative FP7-WALK-MAN project. More precisely, we explored the respective roles of two highly intertwined and biologically-inspired concepts: oscillating Central Pattern Generators (which can be viewed as an archetype rhythmic primitive), and feedback-driven reflexes. A transversal concept the field of motor control and locomotion is the one of motor primitives. This concept was first identified in biology (both in animals and - more indirectly - in humans) and then extensively used in robotics. Rehabilitation robotics thus an appealing field for new investigations, at the intersection of both. | 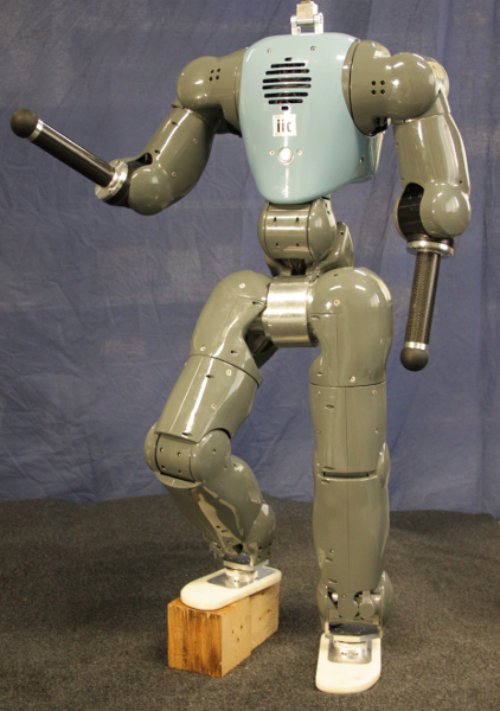 COMAN - © IIT |
In short, motor primitives are fundamental movements whose combination brings to the execution of complex movements. This strategy offers a lot of advantages to the nervous system, lowering the bandwidth requirements, and embedding the coordination of the redundant apparatus within the stored primitives. For these reasons, the concept largely percolated into robotics. Due to the particular coding of motor primitives in robotics, other advantages appeared in the programming of learning mechanisms, optimality principles, rejection of perturbations, etc...
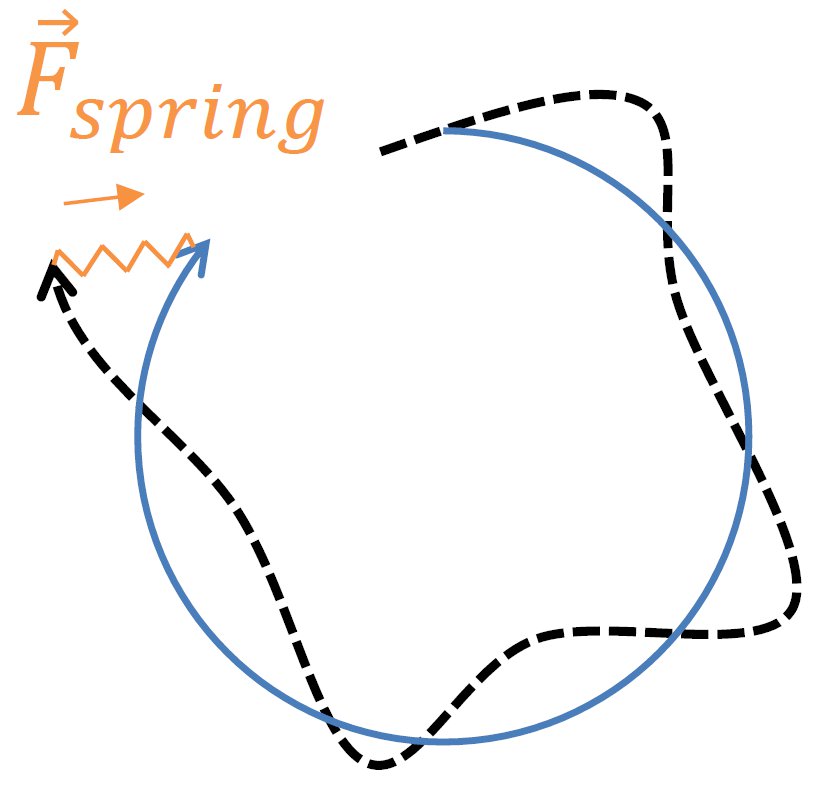
Our research in motor primitives for assistance or rehabilitation robots first focused on the lower-limb. Owing to the intrinsic rhythmicity of lower-limb movements, dynamical oscillators were designed as candidate motor primitives.

We explored these ideas for a wearable ortho-prosthesis, developed within the FP7-CYBERLEGs and H2020-CYBERLEGsPlusPlus projects.
We also investigated primitive-based robot-assisted rehabilitation for the upper-limb, and more precisely for stroke patients. In particular, we explored the differences in performing two different movement primitives after a stroke, namely rhythmic and discrete movements. These results suggest a refinement of classical post-stroke therapies, aiming at better training these two primitives independently, such as their combination.
We are now extending these investigations to other types of movements and patients.
Our third field of research is about animal biomechanics, and more precisely to validate or falsify assumptions about animal behavior in challenging environments, again with a strong focus on the sensori-motor apparatus. Indeed, we address research questions such as:
- What are the neuromusculoskeletal principles governing animal flying and swimming?
- Are these (open-loop) stable behaviors, or should the animal "close the loop", even in steady-state?
- How much energy can be harvested from the fluid in order to minimize the cost of transport?
| Fishes and birds display amazing capacities to extract energy from wakes produced by their environment or their fellows (fishes in a school or birds in a flock). By combining models of biomechanics, fluid-solid interaction, and multi-agent control, we intend to reverse-engineer the mechanisms governing these animal behaviors. We further design robotic experimental platforms to validate model-based hypotheses. We teamed up in the RevealFlight collaborative project to address these questions. |
Conferences
- International Conference on Rehabilitation Robotics
- Annual International Conference of the IEEE Engineering in Medicine and Biology Society
- IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics
- IEEE International Symposium in Robot and Human Interactive Communication
- IEEE/RSJ International Conference on Intelligent Robots and Systems
- Robotics: Science and Systems
- IEEE International Conference on Robotics and Automation
- International Conference on Simulation of Adaptive Behavior
Van Der Velde, Gert ; Laloyaux, Henri ; Ronsse, Renaud. Inducing asymmetric gait in healthy walkers: a review. In: Frontiers in Rehabilitation Sciences, Vol. 6, no.X, p. 1463382 (2025). doi:10.3389/fresc.2025.1463382.
Pomponio, Thomas ; Ronsse, Renaud. A General Method for Dimensioning Antagonistic, Artificial Muscles. Emerging Therapies in Neurorehabilitation III. SSNR SSNR SSNR 2022 2023 2024 (Baiona, Spain, du 16/06/2024 au 21/06/2024). In: Biosystems & Biorobotics : Emerging Therapies in Neurorehabilitation III (Biosystems & Biorobotics; 34), Pons, J.L., Farina, D., Tornero, J., 2025. 9783031849992, p. 132-136. doi:10.1007/978-3-031-85000-4_29.
Guiaux Brinon, Julien ; Ronsse, Renaud. An innovative passive knee prosthesis featuring discrete stiffness levels to provide adaptive support for sit-to-stand and overground walking. 19th IEEE/RAS-EMBS International Conference on Rehabilitation Robotics (ICORR 2025) (Chicago, USA, du 12/05/2025 au 16/05/2025).
Bastin, Brieuc ; Hasegawa, Shoichi ; Solis, Jorge ; Ronsse, Renaud ; Macq, Benoît ; El Hafi, Lotfi ; Garcia Ricardez, Gustavo Alfonso ; Taniguchi, Tadahiro. GPTAlly: A Safety-Oriented System for Human-Robot Collaboration Based on Foundation Models. 2025 IEEE/SICE International Symposium on System Integrations (SII 2025) (Munich, Germany, du 21/01/2025 au 24/01/2025). In: 2025 IEEE/SICE International Symposium on System Integrations, , p. 1-7 (2025).
Martin, Eden ; Hasegawa, Shoichi ; Solis, Jorge ; Macq, Benoît ; Ronsse, Renaud ; Garcia Ricardez, Gustavo Alfonso ; El Hafi, Lotfi ; Taniguchi, Tadahiro. Integrating Multimodal Communication and Comprehension Evaluation during Human-Robot Collaboration for Increased Reliability of Foundation Model-based Task Planning Systems . 2025 IEEE/SICE International Symposium on System Integrations (SII 2025) (Munich, Germany, du 21/01/2025 au 24/01/2025). In: 2025 IEEE/SICE International Symposium on System Integrations, , p. 1-7 (2025).
Devillez, Louis ; Ronsse, Renaud. Real-time Prediction of Leg Joint Kinematics during Steady-State Walking and Task Transitions. 2019 IEEE 19th International Conference on Rehabilitation Robotics (ICORR) (Chicago, United-States of America, du 12/05/2025 au 16/05/2025).
Heremans, François ; Evrard, Jeanne ; Langlois, David ; Ronsse, Renaud. ELSA: A foot-size powered prosthesis reproducing ankle dynamics during various locomotion tasks. In: IEEE Transactions on Robotics, Vol. 41, p. 415-429 (2024). doi:10.1109/tro.2024.3508314.
Heremans, François ; Evrard, Jeanne ; Langlois, David ; Ronsse, Renaud. A Lightweight and Compact Lockable Parallel Spring Enhances the Performance of a Powered Ankle-Foot Prosthesis. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (Heidelberg, Germany, du 1/9/2024 au 4/9/2024). In: 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Vol. , no., p. 407-412 (2024). doi:10.1109/biorob60516.2024.10719808.
Guiaux Brinon, Julien ; Ronsse, Renaud. A novel concept of passive knee prosthesis with multiple stiffnesses to support overground walking and sit-to-stand. Louvain Bionics Symposium 2024 (UCLouvain, Openhub, Louvain-la-Neuve, Belgium, 06/06/2024).
Guiaux Brinon, Julien ; Ronsse, Renaud. A novel concept of passive knee prosthesis with multiple stiffnesses to support overground walking and sit-to-stand. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (Heidelberg, Germany, du 01/09/2024 au 04/09/2024). In: 2024 10th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2024), p. 204-210. doi:10.1109/BioRob60516.2024.10719856.
Colognesi, Victor ; Ronsse, Renaud ; Chatelain, Philippe. Bird formation flight: vortex dynamics, flight control and energy savings. 3rd Colloquium on Vortex Dominated Flows – DisCoVor 2024 (Delft, the Netherlands, du 16/04/2024 au 19/04/2024).
Muijres, Wouter ; Afschrift, Maarten ; Ronsse, Renaud ; De Groote, Friedl. Can we relate increases in metabolic energy with external uncertainty to alterations in anticipatory and feedback balance control?. Dynamic Walking (Pensacola, Florida, USA, du 27/05/2024 au 30/05/2024).
Moreau, Emile ; Herman, Benoît ; Chatelain, Philippe ; Ronsse, Renaud. Design and Characterization of a Robotic Cyber-Physical System for Real-Time Flow-Device Experiments. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (Heidelberg, Germany, du 1/9/2024 au 4/9/2024). In: 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Vol. , no., p. 297-302 (2024). doi:10.1109/biorob60516.2024.10719704.
Devillez, Louis ; Herman, Benoît ; Ronsse, Renaud. Design of a compact active hip prosthesis with human-like range of motion and torque. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (Heidelberg, du 01/09/2024 au 04/09/2024). In: 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), p. 160-166. doi:10.1109/BioRob60516.2024.10719919.
Vandamme, Clémence ; Otlet, Virginie ; Ronsse, Renaud ; Crevecoeur, Frédéric. Flexible and rapid modulation of gait control assessed by long-range autocorrelation. 33rd Annual Meeting of the Society for the Neural Control of Movement (NCM 2024) (Dubrovnik, Croatia, du 15/04/2024 au 19/04/2024).
Evrard, Jeanne ; Heremans, François ; Ronsse, Renaud. Validation of a Heuristic Intention Detection Algorithm for a Powered Ankle Prosthesis Across Various Ambulation Tasks. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (Heidelberg, Germany, du 1/9/2024 au 4/9/2024). In: 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Vol. , no., p. 75-81 (2024). doi:10.1109/biorob60516.2024.10719811.
Devillez, Louis ; Ronsse, Renaud ; Herman, Benoît. Active Hip Disarticulated Prosthesis. .
Heremans, François ; Ronsse, Renaud ; Evrard, Jeanne. Elastic Energy Storing for Prosthesis or Orthosis. Numéro de priorité ; Déposé (30/09/2022) ; Publié (03/04/2024). EP; US EP; US.
Otlet, Virginie ; Ronsse, Renaud. Adaptive walking assistance does not impact long-range stride-to-stride autocorrelations in healthy people. In: Journal of neurophysiology, Vol. 130, no. 2, p. 417-426 (2023). doi:10.1152/jn.00181.2023.
Otlet, Virginie ; Vandamme, Clémence ; Warlop, Thibault ; Crevecoeur, Frédéric ; Ronsse, Renaud. Effects of overground gait training assisted by a wearable exoskeleton in patients with Parkinson’s disease. In: Journal of NeuroEngineering and Rehabilitation, Vol. 20, p. 156 (2023). doi:10.1186/s12984-023-01280-y.
Vandamme, Clémence ; Otlet, Virginie ; Ronsse, Renaud ; Crevecoeur, Frédéric. Model of Gait Control in Parkinson’s Disease and Prediction of Robotic Assistance. In: IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 31, no.1, p. 1374-1383 (2023). doi:10.1109/tnsre.2023.3245286.
Colognesi, Victor ; Ronsse, Renaud ; Chatelain, Philippe. Numerical assessment of wake-based estimation of instantaneous lift in flapping flight of large birds. In: PLOS ONE, Vol. 18, no.5, p. e0284714 (2023). doi:10.1371/journal.pone.0284714.
El Raghibi, Lucas ; Muhoza, Ange Pascal ; Evrard, Jeanne ; Ghazi, Hugo ; Van Oldeneel Tot Oldenzeel, Grégoire ; Sonneville, Victorien ; Macq, Benoît ; Ronsse, Renaud. Virtual Reality can mediate the learning phase of upper limb prostheses supporting a better-informed selection process. In: Journal on Multimodal User Interfaces, Vol. 17, p. 33--46 (2023). doi:10.1007/s12193-022-00400-7.
Muijres, Wouter ; Van Wouwe, Tom ; Ronsse, Renaud ; Afschrift, Maarten ; De Groote, Friedl. Balance support in active prostheses may reduce effort in amputee walking: a simulation study. XIX International Symposium on Computer Simulation in Biomechanics (Kyoto, Japan, du 26/07/2023 au 28/07/2023).
Al-Dabbagh, Ali ; Ronsse, Renaud. Gait features estimation for depth vision-based terrains recognition approach using wearable sensor. Computer Vision for Wearable Robotics Workshop at International Conference on Robotics and Automation (ICRA) 2023 (London, 02/06/2023).
Evrard, Jeanne ; Heremans, François ; Ronsse, Renaud. On the Usability of Polymer-Based Artificial Tendons for Elastic Energy Storage in Active Ankle Prostheses. 2023 International Conference on Rehabilitation Robotics (ICORR) (Singapore, Singapore, du 24/9/2023 au 28/9/2023). In: 2023 International Conference on Rehabilitation Robotics (ICORR), 2023. 979-8-3503-4275-8. doi:10.1109/icorr58425.2023.10304699.
Muijres, Wouter ; Afschrift, Maarten ; Ronsse, Renaud ; De Groote, Friedl. Sensorimotor noise might explain effort in amputee gait: a simulation study. International Society of Biomechanics (Fukuoka, Japan, du 30/07/2023 au 03/08/2023).
Laloyaux, Henri ; Livolsi, Chiara ; Pergolini, Andrea ; Crea, Simona ; Vitiello, Nicola ; Ronsse, Renaud. Simplified Motor Primitives for Gait Symmetrization: Pilot Study with an Active Hip Orthosis. 2023 IEEE International Conference on Robotics and Automation (London, United Kingdom, du 29/05/2023 au 02/06/2023).
Al-Dabbagh, Ali ; Ronsse, Renaud. Depth Vision based Terrain Detection Algorithm during Human Locomotion. In: IEEE Transactions on Medical Robotics and Bionics, Vol. 4, no. 4, p. 1010-1021 (2022). doi:10.1109/tmrb.2022.3206602.
Ducci, Gianmarco ; Vitucci, Gennaro ; Chatelain, Philippe ; Ronsse, Renaud. On the role of tail in stability and energetic cost of bird flapping flight. In: Scientific Reports, Vol. 12, no.1, p. 22629 (2022). doi:10.1038/s41598-022-27179-7.
Ronsse, Renaud. Adaptive Oscillators as Template for Modeling and Assisting Rhythmic Movements. In: Torricelli D., Akay M., Pons J.L., Biosystems and Biorobotics, Springer International Publishing, 2022, p. 271-275. 978-3-030-70316-5. doi:10.1007/978-3-030-70316-5_44.
Al-Dabbagh, Ali Hussein ; Ronsse, Renaud. A New Terrain Recognition Approach for Predictive Control of Assistive Devices Using Depth Vision. Wearable Robotics: Challenges and Trends. WeRob 2020 (Online). In: Biosystems & Biorobotics, Moreno J.C., Masood J., Schneider U., Maufroy C., Pons J.L., 2022. 978-3-030-69546-0, p. 443-447. doi:10.1007/978-3-030-69547-7_71.
Heins, Sophie ; Ronsse, Renaud. Compliant Control of a Transfemoral Prosthesis Combining Predictive Learning and Primitive-Based Reference Trajectories. Wearable Robotics: Challenges and Trends. WeRob 2020 (Online). In: Biosystems & Biorobotics, 2022. 978-3-030-69546-0, p. 89-93. doi:10.1007/978-3-030-69547-7_15.
Laloyaux, Henri ; Beatriz Sanz-Morère, Clara ; Livolsi, Chiara ; Pergolini, Andrea ; Crea, Simona ; Vitiello, Nicola ; Ronsse, Renaud. Experimental Assessment of a Control Strategy for Locomotion Assistance Relying on Simplified Motor Primitives. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (Kyoto, Japan, du 23/10/2022 au 27/10/2022). doi:10.1109/IROS47612.2022.9982128.
Otlet, Virginie ; Ronsse, Renaud. Predicting the effects of oscillator-based assistance on stride-to-stride variability of Parkinsonian walkers. 2022 IEEE International Conference on Robotics and Automation (ICRA) (Philadelphia, PA, USA, du 23/5/2022 au 27/5/2022). In: 2022 International Conference on Robotics and Automation (ICRA), Vol. X, no.X, p. 8083-8089 (2022). doi:10.1109/icra46639.2022.9811822.
Laloyaux, Henri ; Ronsse, Renaud. Reconstruction of Hip Moments Through Constrained Shape Primitives. Wearable Robotics: Challenges and Trends. WeRob 2020 (Online). In: Biosystems & Biorobotics, 2022. 978-3-030-69546-0, p. 383-388. doi:10.1007/978-3-030-69547-7_62.
Guiaux Brinon, Julien ; Ronsse, Renaud ; Marsano da Costa Nunes, Luana ; Herman, Benoît ; Tondu, Bertrand. Rehab Robotics - Open-loop identification of a two degrees of freedom rehabilitation robot actuated with pneumatic artificial muscles. 20th National Day of Biomedical Engineering (20th NDBME) (Brussels, Belgium, 11/10/2022).
Colognesi, Victor ; Ronsse, Renaud ; Chatelain, Philippe. A model coupling biomechanics and fluid dynamics for the simulation of controlled flapping flight. In: Bioinspiration & Biomimetics, Vol. 16, no.2, p. 026023 (2021). doi:10.1088/1748-3190/abdd9c.
Heins, Sophie ; Tolu, Silvia ; Ronsse, Renaud. Online Learning of the Dynamical Internal Model of Transfemoral Prosthesis for Enhancing Compliance. In: IEEE Robotics and Automation Letters, Vol. 6, no. 4, p. 6156-6163 (2021). doi:10.1109/LRA.2021.3091953.
Ducci, Gianmarco ; Colognesi, Victor ; Vitucci, Gennaro ; Chatelain, Philippe ; Ronsse, Renaud. Stability and Sensitivity Analysis of Bird Flapping Flight. In: Journal of Nonlinear Science, Vol. 31, no.2, p. 47 (2021). doi:10.1007/s00332-021-09698-1.
Al-Dabbagh, Ali ; Ronsse, Renaud. Using Depth Vision for Real-Time Terrain Detection in Various Locomotion Modes. 2021 International Conference on Automation, Robotics and Applications (ICARA 2021) (Prague, du 04/02/2021 au 06/02/2021).
Al-Dabbagh, Ali ; Ronsse, Renaud. Using Depth Vision for Terrain Detection during Active Locomotion*. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Prague, Czech Republic, du 27/9/2021 au 1/10/2021). In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021. 978-1-6654-1714-3, p. 208--515. doi:10.1109/iros51168.2021.9636077.
Dehez, Bruno ; Heremans, François ; Ronsse, Renaud. Prosthesis or Orthosis. .
Al-Dabbagh, Ali Hussein ; Ronsse, Renaud. A review of terrain detection systems for applications in locomotion assistance. In: Robotics and Autonomous Systems, Vol. 133, p. 103628 (2020). doi:10.1016/j.robot.2020.103628.
Heins, Sophie ; Flynn, Louis ; Laloyaux, Henri ; Geeroms, Joost ; Lefeber, Dirk ; Ronsse, Renaud. Compliant Control of a Transfemoral Prosthesis by combining Feed-Forward and Feedback. 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (New York City, NY, USA, du 29/11/2020 au 1/12/2020). In: 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2020. 9781728159072. doi:10.1109/biorob49111.2020.9224434.
Van der Noot, Nicolas ; Ijspeert, Auke Jan ; Ronsse, Renaud. Trajectory Planning of a Bio-inspired Walker in 3D Cluttered Environments using Internal Models. 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (New York City, NY, USA, du 29/11/2020 au 1/12/2020). In: 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2020. 9781728159072. doi:10.1109/biorob49111.2020.9224461.
Van der Noot, Nicolas ; Ijspeert, Auke Jan ; Ronsse, Renaud. Neuromuscular model achieving speed control and steering with a 3D bipedal walker. In: Autonomous Robots, Vol. 43, p. 1537-1554 (2019). doi:10.1007/s10514-018-9814-6.
Leconte, Patricia ; Stoquart, Gaëtan ; Lejeune, Thierry ; Ronsse, Renaud. Rhythmic robotic training enhances motor skills of both rhythmic and discrete upper-limb movements after stroke : a longitudinal pilot study. In: International Journal of Rehabilitation Research, Vol. 42(1):46-55., no. 1, p. 46-55 (2019). doi:10.1097/mrr.0000000000000325.
Bernier, Caroline ; Gazzola, Mattia ; Ronsse, Renaud ; Chatelain, Philippe. Simulations of propelling and energy harvesting articulated bodies via vortex particle-mesh methods. In: Journal of Computational Physics, Vol. 392, p. 34-55 (1 september 2019). doi:10.1016/j.jcp.2019.04.036.
Ronsse, Renaud. Bio-inspired Walking: From Humanoids to Assistive Devices. In: Maria Chiara Carrozza, Silvestro Micera, José L. Pons, Biosystems & Biorobotics : Wearable Robotics: Challenges and Trends (Wearable Robotics: Challenges and Trends), Springer: Cham, 2019, p. 271-275. 9783030018863. doi:10.1007/978-3-030-01887-0_52.
Heremans, François ; Vijayakumar, Sethu ; Bouri, Mohamed ; Dehez, Bruno ; Ronsse, Renaud. Bio-inspired design and validation of the Efficient Lockable Spring Ankle (ELSA) prosthesis. 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR) (Toronto, ON, Canada, du 24/6/2019 au 28/6/2019). In: 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), IEEE, 2019. 9781728127552. doi:10.1109/icorr.2019.8779421.
Laloyaux, Henri ; Ronsse, Renaud. Extraction of Simple Monophasic Motor Primitives towards Bio-Inspired Locomotion Assistance. 2019 IEEE International Conference on Cyborg and Bionic Systems (Munich, Germany, du 18/09/2019 au 20/09/2019). In: 2019 IEEE International Conference on Cyborg and Bionic Systems, 2019. doi:10.1109/CBS46900.2019.9114458.
Van der Noot, Nicolas ; Ijspeert, Auke Jan ; Ronsse, Renaud. Bio-inspired controller achieving forward speed modulation with a 3D bipedal walker. In: The International Journal of Robotics Research, Vol. 37, p. 168-196 (2018). doi:10.1177/0278364917743320.
Heins, Sophie ; Flynn, Louis ; Geeroms, Joost ; Lefeber, Dirk ; Ronsse, Renaud. Torque control of an active elastic transfemoral prosthesis via quasi-static modelling. In: Robotics and Autonomous Systems, Vol. 107, p. 100-115 (2018). doi:10.1016/j.robot.2018.05.015.
Ronsse, Renaud ; Lefèvre, Philippe. Bio-Inspired Robotics: From Rehabilitation to Human Augmentation. In: Famerée, Joseph; Rodrigues, Paulo, The Genesis of Concepts and the Confrontation of Rationalities (Bibliotheca Ephemeridum Theologicarum Lovaniensium), Peeters : Louvain, 2018, p. 245. 978-90-429-3597-6.
Harding, Matthew ; Van der Noot, Nicolas ; Somers, Bruno ; Ronsse, Renaud ; Ijspeert, Auke Jan. Augmented Neuromuscular Gait Controller Enables Real-time Tracking of Bipedal Running Speed. 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (Enschede, Netherlands, du 26/8/2018 au 29/8/2018). In: 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), IEEE, 2018. 978-1-5386-8183-1. doi:10.1109/biorob.2018.8488054.
Greiner, Philippe ; Van Der Noot, Nicolas ; Ijspeert, Auke Jan ; Ronsse, Renaud. Continuous Modulation of Step Height and Length in Bipedal Walking, Combining Reflexes and a Central Pattern Generator. 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (Enschede, Netherlands, du 26/8/2018 au 29/8/2018). In: 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), IEEE, 2018. 978-1-5386-8183-1. doi:10.1109/biorob.2018.8487799.
Heremans, François ; Dehez, Bruno ; Ronsse, Renaud. Design and Validation of a Lightweight Adaptive and Compliant Locking Mechanism for an Ankle Prosthesis. 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (Enschede, Netherlands, du 26/8/2018 au 29/8/2018). In: 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), IEEE, 2018. 978-1-5386-8183-1. doi:10.1109/biorob.2018.8487209.
Bernier, Caroline ; Gazzola, Mattia ; Chatelain, Philippe ; Ronsse, Renaud. Numerical Simulations and Development of Drafting Strategies for Robotic Swimmers at Low Reynolds Number. 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (Enschede, Netherlands, du 26/8/2018 au 29/8/2018). In: 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), IEEE, 2018. 978-1-5386-8183-1. doi:10.1109/biorob.2018.8488055.
Bernier, Caroline ; Gazzola, Mattia ; Ronsse, Renaud ; Chatelain, Philippe. Numerical simulations and environment sensing strategies for robotic swimmers at low Reynolds number. Controlling Behaviour in animals and robots (Lausanne, du 03/12/2018 au 04/12/2018).
Heins, Sophie ; Flynn, Louis ; Geeroms, Joost ; Lefeber, Dirk ; Ronsse, Renaud. Quasi-Static Modelling of a Redundant Knee Prosthesis. 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (Enschede, Netherlands, du 26/8/2018 au 29/8/2018). In: 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), IEEE, 2018. 978-1-5386-8183-1. doi:10.1109/biorob.2018.8487632.
Yan, Tingfang ; Parri, Andrea ; Ruiz Garate, Virginia ; Cempini, Marco ; Ronsse, Renaud ; Vitiello, Nicola. An oscillator-based smooth real-time estimate of gait phase for wearable robotics. In: Autonomous Robots, Vol. 41, no. 3, p. 759–774 (2017). doi:10.1007/s10514-016-9566-0.
Ruiz Garate, Virginia ; Parri, Andrea ; Yan, Tingfang ; Munih, Marko ; Molino Lova, Raffaele ; Vitiello, Nicola ; Ronsse, Renaud. Experimental Validation of Motor Primitive-Based Control for Leg Exoskeletons during Continuous Multi-Locomotion Tasks. In: Frontiers in Neurorobotics, Vol. 11, p. 15 (2017). doi:10.3389/fnbot.2017.00015.
Zobova, Alexandra ; Habra, Timothée ; Van der Noot, Nicolas ; Dallali, Houman ; Tsagarakis, Nikolaos G. ; Fisette, Paul ; Ronsse, Renaud. Multi-physics modelling of a compliant humanoid robot. In: Multibody System Dynamics, Vol. 39, no.1-2, p. 95-114 (2017). doi:10.1007/s11044-016-9545-4.
Grotz, Markus ; Habra, Timothée ; Ronsse, Renaud ; Asfour, Tamim. Autonomous view selection and gaze stabilization for humanoid robots. 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Vancouver, BC, Canada, du 24/9/2017 au 28/9/2017). In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2017. 978-1-5386-2682-5, p. 1427-1434. doi:10.1109/iros.2017.8205944.
Bernier, Caroline ; Gazzola, Mattia ; Ronsse, Renaud ; Chatelain, Philippe. Combining the Vortex Particle-Mesh method with a Multi-Body System solver for the simulation of self-propelled articulated swimmers. 70th Annual Meeting of the APS Division of Fluid Dynamics (Denver, du 19/11/2017 au 21/11/2017).
Heremans, François ; Ronsse, Renaud. Design of an energy efficient transfemoral prosthesis using lockable parallel springs and electrical energy transfer. 2017 International Conference on Rehabilitation Robotics (ICORR) (London, United Kingdom, du 17/07/2017 au 20/07/2017). In: Rehabilitation Robotics (ICORR), 2017 International Conference on, Vol. 0, no.0, p. 1305-1312 (2017). doi:10.1109/ICORR.2017.8009429.
Ronsse, Renaud ; Tummers, Matthias ; Everarts, Christophe. Modeling and control of a transfemoral prosthesis embedding two infinitely variable transmissions. 2017 International Conference on Rehabilitation Robotics (ICORR) (London, United Kingdom, du 17/07/2017 au 20/07/2017). In: Rehabilitation Robotics (ICORR), 2017 International Conference on, Vol. 0, no.0, p. 1189-1196 (2017). doi:10.1109/ICORR.2017.8009411.
Habra, Timothée ; Grotz, Markus ; Sippel, David ; Asfour, Tamim ; Ronsse, Renaud. Multimodal gaze stabilization of a humanoid robot based on reafferences. 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids) (Birmingham, du 15/11/2017 au 17/11/2017). In: 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids), IEEE, 2017. 978-1-5386-4678-6. doi:10.1109/humanoids.2017.8239536.
Leconte, Patricia ; Ronsse, Renaud. Performance-based robotic assistance during rhythmic arm exercises. In: Journal of NeuroEngineering and Rehabilitation, Vol. 13, no.1, p. 82 (2016). doi:10.1186/s12984-016-0189-7.
Leconte, Patricia ; Orban de Xivry, Jean-Jacques ; Stoquart, Gaëtan ; Lejeune, Thierry ; Ronsse, Renaud. Rhythmic arm movements are less affected than discrete ones after a stroke. In: Experimental Brain Research, Vol. 234, no. 6, p. 1403-1417 (2016). doi:10.1007/s00221-015-4543-y.
Ruiz Garate, Virginia ; Parri, Andrea ; Yan, Tingfang ; Munih, Marko ; Molino Lova, Raffaele ; Vitiello, Nicola ; Ronsse, Renaud. Walking Assistance Using Artificial Primitives: A Novel Bioinspired Framework Using Motor Primitives for Locomotion Assistance Through a Wearable Cooperative Exoskeleton. In: IEEE Robotics and Automation Magazine, Vol. 23, no.1, p. 83-95 (2016). doi:10.1109/MRA.2015.2510778.
Habra, Timothée ; Dallali, Houman ; Cardellino, Alberto ; Natale, Lorenzo ; Tsagarakis, Nikolaos ; Fisette, Paul ; Ronsse, Renaud. Robotran-YARP interface: a framework for real-time controller developments based on multibody dynamics simulations. In: Multibody Dynamics Computational Methods and Applications, Springer International Publishing, 2016. 978-3-319-30612-4. doi:10.1007/978-3-319-30614-8.
Heremans, François ; Van der Noot, Nicolas ; Ijspeert, Auke J. ; Ronsse, Renaud. Bio-inspired balance controller for a humanoid robot. 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob) (Singapore, Singapore, du 26/06/2016 au 29/06/2016). In: 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2016. 978-1-5090-3287-7, p. 441-448. doi:10.1109/BIOROB.2016.7523667.
Bernier, Caroline ; Mattia, Gazzola ; Ronsse, Renaud ; Chatelain, Philippe. Coupling a vortex particle-mesh method to a multi-body system solver for the simulation of articulated swimmers. 7th International Conference on Vortex Flows and Vortex Models (ICVFM 2016) (Rostock, Germany, du 19/09/2016 au 22/09/2016).
Habra, Timothée ; Ronsse, Renaud. Gaze Stabilization of a Humanoid Robot based on Virtual Joints. National Day on Biomedical Engineering 2015 (Bruxelles, 04/03/2016).
Habra, Timothée ; Ronsse, Renaud. Gaze stabilization of a humanoid robot based on virtual linkage. 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob) (Singapore, Singapore, du 26/06/2016 au 29/06/2016). In: 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2016. 978-1-5090-3287-7, p. 163-169. doi:10.1109/BIOROB.2016.7523616.
Ruiz Garate, Virginia ; Parri, Andrea ; Yan, Tingfang ; Munih, Marko ; Lova, Raffaele Molino ; Vitiello, Nicola ; Ronsse, Renaud. Motor primitive-based control for lower-limb exoskeletons. 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob) (Singapore, Singapore, du 26/06/2016 au 29/06/2016). In: 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2016. 978-1-5090-3287-7, p. 655-661. doi:10.1109/BIOROB.2016.7523700. doi:10.1109/BIOROB.2016.7523700.
Leconte, Patricia ; Ronsse, Renaud. Real-time smoothness-based assistance during rhythmic arm movements. 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob) (Singapore, Singapore, du 26/06/2016 au 29/06/2016). In: 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2016. 978-1-5090-3287-7, p. 850-856. doi:10.1109/BIOROB.2016.7523734.
Van der Noot, Nicolas ; Ijspeert, Auke, Jan ; Ronsse, Renaud. Biped gait controller for large speed variations, combining reflexes and a central pattern generator in a neuromuscular model. 2015 IEEE International Conference on Robotics and Automation (ICRA) (Seattle, WA, USA, du 26/05/2015 au 30/05/2015). In: Robotics and Automation (ICRA), 2015 IEEE International Conference on, 2015. 9781479969241, pp.6267-6274. doi:10.1109/ICRA.2015.7140079.
Van der Noot, Nicolas ; Colasanto, Luca ; Barrea, Allan ; van den Kieboom, Jesse ; Ronsse, Renaud ; Ijspeert, Auke Jan. Experimental validation of a bio-inspired controller for dynamic walking with a humanoid robot. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Hamburg, Germany, du 28/09/2015 au 02/10/2015). In: Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on, 2015. 978-1-4799-9994-1, p. 393 - 400. doi:10.1109/IROS.2015.7353403.
Zobova, Alexandra ; Habra, Timothée ; Van der Noot, Nicolas ; Dallali, Houman ; Tsagarakis, Nikolaos ; Fisette, Paul ; Ronsse, Renaud. Multi-physics Modelling of a Compliant Humanoid Robot. ECCOMAS Thematic Conference Multibody Dynamics 2015 (Barcelona, du 29/06/2015 au 02/07/2015).
Everarts, Christophe ; Dehez, Bruno ; Ronsse, Renaud. Novel infinitely Variable Transmission allowing efficient transmission ratio variations at rest. Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on (Hamburg, du 28/09/2015 au 02/10/2015). In: Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on, 2015. 978-1-4799-9994-1, p. 5844 - 5849. doi:10.1109/IROS.2015.7354207.
Habra, Timothée ; Fisette, Paul ; Ronsse, Renaud. Robotran-Yarp interface: a framework for real-time controller development based on multibody dynamics simulation. ECCOMAS Thematic Conference Multibody Dynamics 2015 (Barcelona, du 29/06/2015 au 02/07/2015).
. Continuously Variable Planetary Transmission. Numéro de priorité ; Déposé (05/05/2014) ; Publié (12/11/2015). AL, AT, BE, BG, CH, CY, CZ, DE, DK, EE, ES, FI, FR, GB, GR, HR, HU, IE, IS, IT, LI, LT, LU, LV, MC, MK, MT, NL, NO, PL, PT, RO, RS, SE, SI, SK, SM, TR .
Ruiz Garate, Virginia ; Collard, Jean-François ; Ronsse, Renaud. Bio-Inspired Model for Locomotion Assistance. 7th International Workshop on Human-Friendly Robotics (HFR2014) (BioRobotics Institute at Museo Piaggio, in Pontedera, Italy, du 23/10/2014 au 24/10/2014).
Ruiz Garate, Virginia ; Collard, Jean-François ; Ronsse, Renaud. Bio-inspired Model for Locomotion Assistance. National Day on Biomedical Engineering 2014 (NCBME 2014) (Royal Academy of Belgium for Science and Arts in Brussels, Belgium, 28/11/2014).
Ruiz Garate, Virginia ; Collard, Jean-François ; Ronsse, Renaud. Bio-inspired Model for Walking Assistance. International Workshop on Wearable Robotics (WeRob 2014) (Parador de Baiona, Galicia, Spain, du 14/09/2014 au 19/09/2014).
Leconte, Patricia ; Ronsse, Renaud. Difference in performing rhythmic and discrete upper-limb movements after stroke. NCM 24th Annual Meeting (Amsterdam, the Netherlands, du 21/04/2014 au 25/04/2014).
Flynn, Louis ; Giovacchini, Francesco ; Ambrozic, Luka ; Gorsic, Maja ; Munih, Marko ; Ruiz Garate, Virginia ; Collard, Jean-François ; Ronsse, Renaud ; Molino-Lova, Raffaele ; Vannetti, Federica ; Geeroms, Joost ; Jimenez Fabian, Rene Enrique ; Vanderborght, Bram ; Lefeber, Dirk. Introduction to CYBERLEGs: Hardware and Control. International Workshop on Wearable Robotics (WeRob 2014) (Parador de Baiona, Galicia, Spain, du 14/09/2014 au 19/09/2014).
Leconte, Patricia ; Ronsse, Renaud. Rhythmic upper-limb therapy improves both rhythmic and discrete movement features after stroke. 13th Belgian day on biomedical engineering (Bruxelles, 28/11/2014).
Van der Noot, Nicolas ; Dzeladini, Florin ; Ijspeert, Auke J. ; Ronsse, Renaud. Simplification of the Hill Muscle Model Computation for Real-Time Walking Controllers with Large Time Steps. Dynamic Walking (Zurich, du 10/06/2014 au 13/06/2014).
Ronsse, Renaud ; De Rossi, Stefano Marco Maria ; Vitiello, Nicola ; Lenzi, Tommaso ; Carrozza, Maria Chiara ; Ijspeert, Auke Jan. Real-time estimate of velocity and acceleration of quasi-periodic signals using adaptive oscillators. In: IEEE Transactions on Robotics, Vol. 29, no. 3, p. 783 - 791 (2013). doi:10.1109/TRO.2013.2240173.
Everarts, Christophe ; Vallery, Heike ; Bolliger, Marc ; Ronsse, Renaud. Adaptive Position Anticipation in a Support Robot for Overground Gait Training. 12th Belgian Day on Biomedical Engineering (Brussels, 13/12/2013).
Everarts, Christophe ; Vallery, H. ; Bolliger, M. ; Ronsse, Renaud. Adaptive position anticipation in a support robot for overground gait training enhances transparency. 2013 IEEE 13th International Conference on Rehabilitation Robotics, ICORR 2013 (Seattle, WA, du 24 June 2013 au 26 June 2013). In: 2013 IEEE 13th International Conference on Rehabilitation Robotics, ICORR 2013, IEEE, 2013. 978-1-4673-6022-7. doi:10.1109/ICORR.2013.6650483.
Vallery, H. ; Lutz, P. ; Von Zitzewitz, J. ; Rauter, G. ; Fritschi, M. ; Everarts, Christophe ; Ronsse, Renaud ; Curt, A. ; Bolliger, M.. Multidirectional transparent support for overground gait training. 2013 IEEE 13th International Conference on Rehabilitation Robotics, ICORR 2013 (Seattle, WA, du 24 June 2013 au 26 June 2013). In: 2013 IEEE 13th International Conference on Rehabilitation Robotics, ICORR 2013, IEEE, 2013. 978-1-4673-6022-7. doi:10.1109/ICORR.2013.6650512.
Ruiz Garate, Virginia ; Collard, Jean-François ; Ronsse, Renaud. Reflex-based Model for Walking Assistance. ALTACRO (Brussels, Belgium, 18/10/2013).
Ruiz Garate, Virginia ; Collard, Jean-François ; Ronsse, Renaud. Reflex-based Model for Walking Assistance. National Day on Biomedical Engineering 2013 (NCBME 2013) (Brussels, Belgium).
Heitger, Marcus H ; Ronsse, Renaud ; Dhollander, Thijs ; Dupont, Patrick ; Caeyenberghs, Karen ; Swinnen, Stephan P. Motor learning-induced changes in functional brain connectivity as revealed by means of graph-theoretical network analysis.. In: NeuroImage, Vol. 61, no. 3, p. 633-650 (2012). doi:10.1016/j.neuroimage.2012.03.067.
Van Dijk, W. ; Koopman, B. ; Ronsse, Renaud ; Van Der Kooij, H.. Feed-forward support of human walking. Biomedical Robotics and Biomechatronics (BioRob), 2012 4th IEEE RAS & EMBS International Conference on (Rome). In: Biomedical Robotics and Biomechatronics (BioRob), 2012 4th IEEE RAS & EMBS International Conference on, 2012. 978-1-4577-1199-2, 1955-1960. doi:10.1109/BioRob.2012.6290839.
Ronsse, Renaud ; De Rossi, Stefano Marco Maria ; Vitiello, Nicola ; Lenzi, Tommaso ; Koopman, Bram ; van der Kooij, Herman ; Carrozza, Maria Chiara ; Ijspeert, Auke Jan. Real-time estimate of period derivatives using adaptive oscillators: Application to impedance-based walking assistance. Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on (Vilamoura). In: Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on, A.T. de Almeida and Urbano Nunes: Vilamoura-Algarve, Portugal, 2012. 978-1-4673-1737-5, 3362-3368. doi:10.1109/IROS.2012.6385702.
Everarts, Christophe ; Dehez, Bruno ; Ronsse, Renaud. Variable Stiffness Actuator Based on Infinitely Variable Transmission: Application to an Active Ankle Prosthesis. 5th International Workshop on Human-Friendly Robotics (Brussels, Belgium, du 18/10/2012 au 19/10/2012).
Everarts, Christophe ; Dehez, Bruno ; Ronsse, Renaud. Variable Stiffness Actuator applied to an active ankle prosthesis: Principle, energy-efficiency, and control. Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on (Vilamoura), p. 323-328. In: Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on, A.T. de Almeida and Urbano Nunes: Vilamoura-Algarve, Portugal, 2012. 978-1-4673-1737-5. doi:10.1109/IROS.2012.6385789.
Ronsse, Renaud ; Vitiello, Nicola ; Lenzi, Tommaso ; van den Kieboom, Jesse ; Carrozza, Maria Chiara ; Ijspeert, Auke Jan. Human-robot synchrony: flexible assistance using adaptive oscillators.. In: IEEE transactions on bio-medical engineering, Vol. 58, no. 4, p. 1001-12 (2011). doi:10.1109/TBME.2010.2089629.
Ronsse, Renaud ; Puttemans, Veerle ; Coxon, James P ; Goble, Daniel J ; Wagemans, Johan ; Wenderoth, Nicole ; Swinnen, Stephan P. Motor learning with augmented feedback: modality-dependent behavioral and neural consequences.. In: Cerebral cortex, Vol. 21, no. 6, p. 1283-94 (2011). doi:10.1093/cercor/bhq209.
Ronsse, Renaud ; Lenzi, Tommaso ; Vitiello, Nicola ; Koopman, Bram ; van Asseldonk, Edwin ; De Rossi, Stefano Marco Maria ; van den Kieboom, Jesse ; van der Kooij, Herman ; Carrozza, Maria Chiara ; Ijspeert, Auke Jan. Oscillator-based assistance of cyclical movements: model-based and model-free approaches.. In: Medical & Biological Engineering & Computing, Vol. 49, no. 10, p. 1173-1185 (2011). doi:10.1007/s11517-011-0816-1.
De Rossi, Stefano Marco Maria ; Vitiello, Nicola ; Lenzi, Tommaso ; Ronsse, Renaud ; Koopam, Bram ; Persichetti, Alessandro ; Vecchi, Fabrizio ; Ijspeert, Auke Jan ; van der Kooij, Herman ; Carrozza, Maria Chiara. Sensing Pressure Distribution on a Lower-Limb Exoskeleton Physical Human-Machine Interface. In: Sensors, Vol. 11, no. 1, p. 207-227 (2011). doi:10.3390/s110100207.
Ronsse, Renaud ; Lenzi, Tommaso ; Vitiello, Nicola ; De Rossi, Stefano Marco Maria ; Carrozza, Maria Chiara ; Koopman, Bram ; van Asseldonk, Edwin H F ; van der Kooij, Herman ; van den Kieboom, Jesse ; Ijspeert, Auke Jan. Adaptive oscillators anticipate movements in human-robot interactions. 4th International Workshop on Human-Friendly Robotics (HFR 2011) (University of Twente, Enschede, The Netherlands, du 08/11/2011 au 09/11/2011).
Rinderknecht, Mike Domenik ; Delaloye, Fabien André ; Crespi, Alessandro ; Ronsse, Renaud ; Ijspeert, Auke Jan. Assistance using adaptive oscillators: Robustness to errors in the identification of the limb parameters. Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on (Zurich), (2011). In: Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on, 2011. 978-1-4244-9863-5. doi:10.1109/ICORR.2011.5975351.
Ronsse, Renaud ; van den Kieboom, Jesse ; Ijspeert, Auke Jan. Automatic Resonance Tuning and Feedforward Learning of Biped Walking using Adaptive Oscillators. Multibody Dynamics 2011, ECCOMAS Thematic Conference (Brussels, Belgium, du 04/07/2011 au 07/07/2011). In: Proceeding of the Conference in Multibody Dynamics 2011, ECCOMAS Thematic Conference, Jean-Claude Samin and Paul Fisette, 2011. 978-2-8052-0116-5.
van den Kieboom, Jesse ; Sergi, Fabrizio ; Accoto, Dino ; Guglielmelli, Eugenio ; Ronsse, Renaud ; Ijspeert, Auke J.. Co-evolution of Morphology and Control of a Wearable Robot for Human Locomotion Assistance Exploiting Variable Impedance Actuators. The European Future Technologies Conference and Exhibition 2011 (Budapest, du 04/05/2011 au 06/05/2011). doi:10.1016/j.procs.2011.09.043.
Everarts, Christophe ; Thissen, Alexandre ; Dehez, Bruno ; Ijspeert, Auke Jan ; Ronsse, Renaud. Control and Design of an Active Prosthesis Based on Adaptive Oscillators. 10th Belgian Day on Biomedical Engineering (Brussels, 02/12/2011).
Ronsse, Renaud ; Lenzi, Tommaso ; Vitiello, Nicola ; Koopman, Bram ; van Asseldonk, Edwin H F ; De Rossi, Stefano Marco Maria ; van den Kieboom, Jesse ; van der Kooij, Herman ; Carrozza, Maria Chiara ; Ispeert, Auke Jan. Oscillator-Based Assistance of Upper-Limb and Locomotion Movements. Annual symposium of the IEEE EMBS Benelux Chapter (Leuven / Brussels, du 01/12/2011 au 02/12/2011).
Ronsse, Renaud ; Koopman, Bram ; Vitiello, Nicola ; Lenzi, Tommaso ; De Rossi, Stefano Marco Maria ; van den Kieboom, Jesse ; van Asseldonk, Edwin H F ; Carrozza, Maria Chiara ; van der Kooij, Herman ; Ijspeert, Auke Jan. Oscillator-based walking assistance: A model-free approach. Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on (Zurich), (2011). In: Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on, 2011. 978-1-4244-9863-5. doi:10.1109/ICORR.2011.5975352.
Koopman, Bram ; van Asseldonk, Edwin H F ; Ronsse, Renaud ; van Dijk, Wietse ; van der Kooij, Herman. Rendering potential wearable robot designs with the LOPES gait trainer. Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on (Zurich), (2011). In: Rehabilitation Robotics (ICORR), 2011 IEEE International Conference on, 2011. 978-1-4244-9863-5. doi:10.1109/ICORR.2011.5975448.
Ronsse, Renaud ; Sternad, Dagmar. Bouncing between model and data : stability, passivity, and optimality in hybrid dynamics.. In: Journal of Motor Behavior, Vol. 42, no. 6, p. 389-399 (2010). doi:10.1080/00222895.2010.526451.
Ronsse, Renaud ; Wei, Kunlin ; Sternad, Dagmar. Optimal control of a hybrid rhythmic-discrete task: the bouncing ball revisited.. In: Journal of neurophysiology, Vol. 103, no. 5, p. 2482-93 (2010). doi:10.1152/jn.00600.2009.
Ronsse, Renaud ; Vitiello, Nicola ; Lenzi, Tommaso ; van den Kieboom, Jesse ; Carrozza, Maria Chiara ; Ijspeert, Auke Jan. Adaptive oscillators with human-in-the-loop: Proof of concept for assistance and rehabilitation. Biomedical Robotics and Biomechatronics (BioRob), 2010 3rd IEEE RAS and EMBS International Conference on (Tokyo), (2010). In: Biomedical Robotics and Biomechatronics (BioRob), 2010 3rd IEEE RAS and EMBS International Conference on, 2010. 978-1-4244-7708-1, 668-674. doi:10.1109/BIOROB.2010.5628021.
Ronsse, Renaud ; Sternad, Dagmar. Bouncing between models and data: stability, passivity, and optimality in hybrid dynamics.. FENS 2010 Satellite Symposium on Motor Control (Nijmegen, the Netherlands, du 01/07/2010 au 02/07/2010).
Ronsse, Renaud ; Vitiello, Nicola ; Lenzi, Tommaso ; De Rossi, Stefano Marco Maria ; Koopman, Bram ; van Asseldonk, Edwin H F ; van den Kieboom, Jesse ; van der Kooij, Herman ; Carrozza, Maria Chiara ; Ijspeert, Auke Jan. Flexible Assistance using Adaptive Oscillators: Model-based and Model-free Approaches. Workshop on "Future Trends in Rehabilitation Robotics" at the 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob 2010) (Tokyo, Japan, du 26/09/2010 au 29/09/2010). doi:10.1109/IEMBS.2010.5626409.
Heitger, Marcus ; Ronsse, Renaud ; Dhollander, Thijs ; Dupont, Patrick ; Wenderoth, Nicole ; Swinnen, Stephan P. Graph-theoretical network analysis shows changes of functional brain connectivity in motor learning. 16th Annual Meeting of the Organization for Human Brain Mapping (Barcelona, du 06/06/2010 au 10/06/2010). In: 16th Annual Meeting of the Organization for Human Brain Mapping, 2010.
De Rossi, Stefano Marco Maria ; Vitiello, Nicola ; Lenzi, Tommaso ; Ronsse, Renaud ; Koopman, Bram ; Persichetti, Alessandro ; Giovacchini, Francesco ; Vecchi, Fabrizio ; Ijspeert, Auke Jan ; van der Kooij, Herman ; Carrozza, Maria Chiara. Soft artificial tactile sensors for the measurement of human-robot interaction in the rehabilitation of the lower limb.. Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE (Buenos Aires), (2010). In: Engineering in Medicine and Biology Society (EMBC), 2010 Annual International Conference of the IEEE, 2010. 978-1-4244-4123-5, 1279-1282.
Ronsse, Renaud ; Sternad, Dagmar ; Lefèvre, Philippe. A computational model for rhythmic and discrete movements in uni- and bimanual coordination.. In: Neural computation, Vol. 21, no. 5, p. 1335-70 (2009). doi:10.1162/neco.2008.03-08-720.
Ronsse, Renaud ; Miall, R Chris ; Swinnen, Stephan P. Multisensory integration in dynamical behaviors: maximum likelihood estimation across bimanual skill learning.. In: The Journal of neuroscience, Vol. 29, no. 26, p. 8419-28 (2009). doi:10.1523/JNEUROSCI.5734-08.2009.
White, Olivier ; Bleyenheuft, Yannick ; Ronsse, Renaud ; Smith, Allan M ; Thonnard, Jean-Louis ; Lefèvre, Philippe. Altered gravity highlights central pattern generator mechanisms. In: Journal of Neurophysiology, Vol. 100, no. 5, p. 2819-2824 (2008). doi:10.1152/jn.90436.2008.
Ronsse, Renaud ; Thonnard, Jean-Louis ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Control of bimanual rhythmic movements: trading efficiency for robustness depending on the context. In: Experimental Brain Research, Vol. 187, no. 2, p. 193-205 (2008). doi:10.1007/s00221-008-1297-9.
Li, Yong ; Levin, Oron ; Forner-Cordero, Arturo ; Ronsse, Renaud ; Swinnen, Stephan P. Coordination of complex bimanual multijoint movements under increasing cycling frequencies: the prevalence of mirror-image and translational symmetry.. In: Acta psychologica, Vol. 130, no. 3, p. 183-95 (2009). doi:10.1016/j.actpsy.2008.12.003.
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Robotics and neuroscience: a rhythmic interaction. In: Neural Networks, Vol. 21, no. 4, p. 577-583 (2008). doi:10.1016/j.neunet.2008.03.005.
Alaerts, Kaat ; Ronsse, Renaud ; Martens, E ; De Vos, Jeroen ; Swinnen, Stephan P ; Wenderoth, Nicole. Observing how others lift light or heavy objects: Do internal models influence mirror neuron activity?. Society for Neuroscience annual meeting 2008 (Washington DC, USA, du 15/11/2008 au 19/11/2008).
Ronsse, Renaud ; Wei, Kunlin ; Sternad, Dagmar. Optimal feedback control of rhythmic movements - the bouncing ball revisited.. Society for Neuroscience annual meeting 2008 (Washington DC, USA, du 15/11/2008 au 19/11/2008).
Ronsse, Renaud ; Wei, Kunlin ; Sternad, Dagmar. Optimal feedback control of rhythmic movements - the bouncing ball revisited.. Advances in Computational Motor Control (7th Annual Symposium) (Washington DC, USA, du 14/11/2008 au 14/11/2008).
Ronsse, Renaud ; Swinnen, Stephan P. Optimal multi-sensory integration in bimanual coordination.. Society for Neuroscience annual meeting 2008 (Washington DC, USA, du 15/11/2008 au 19/11/2008).
Ronsse, Renaud ; White, Olivier ; Lefèvre, Philippe. Computation of gaze orientation under unrestrained head movements. In: Journal of neuroscience methods, Vol. 159, no. 1, p. 158-69 (2007). doi:10.1016/j.jneumeth.2006.06.016.
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Rhythmic feedback control of a blind planar juggler. In: IEEE Transactions on Robotics, Vol. 23, no. 4, p. 790-802 (2007). doi:10.1109/TRO.2007.900602.
Ronsse, Renaud ; Sternad, Dagmar ; Lefèvre, Philippe. A computational model for discrete and rhythmic movements in unimanual and bimanual coordination.. Society for Neuroscience annual meeting 2007 (San Diego, CA, USA, du 03/11/2007 au 07/11/2007).
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. A computational model for trajectory planning and on-line movement control in rhythmic tasks.. 17th Annual Meeting of the Society for the Neural Control of Movement (Sevilla, Spain, du 25/03/2007 au 01/04/2007).
White, Olivier ; Bleyenheuft, Yannick ; Ronsse, Renaud ; Smith, Allan M ; Thonnard, Jean-Louis ; Lefèvre, Philippe. Altered gravity highlights central pattern generators mechanisms. 4th European Congress Medicine in Space and in Extreme Environments - Achievements for Health Care on Earth (Berlin, Germany, du 24/10/2007 au 26/10/2007).
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Sensorless stabilization of bounce juggling. In: IEEE Transactions on Robotics, Vol. 22, no. 1, p. 147-59 (2006). doi:10.1109/TRO.2005.858860.
Ronsse, Renaud ; Sepulchre, Rodolphe. Feedback control of impact dynamics: the bouncing ball revisited. Decision and Control, 2006 45th IEEE Conference on (San Diego, CA), (2006). In: Decision and Control, 2006 45th IEEE Conference on, 2006. 1-4244-0171-2, 4807-4812. doi:10.1109/CDC.2006.376774.
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Visual feedback influences bimanual coordination in a rhythmic task.. Society for Neuroscience annual meeting 2006 (Atlanta, GA, USA, du 14/10/2006 au 18/10/2006).
Chang, Dong-Eui ; Ronsse, Renaud ; Sepulchre, Rodolphe. Is bounce juggling easier in a parabolic billiard than in a wedge?. 5th Euromech nonlinear dynamics conference (eindhoven, Netherlands, du 07/08/2005 au 12/08/2005). In: Proceedings of the 5th Euromech nonlinear dynamics conference - 2005, p. 321-328 (2005). In: , 2005.
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. The role of visual feedback in a rhythmic task.. Society for Neuroscience annual meeting 2005 (Washington DC, USA, du 12/11/2005 au 16/11/2005).
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Timing Feedback Control of a Rhythmic System. Decision and Control, 2005 and 2005 European Control Conference. CDC-ECC '05. 44th IEEE Conference on (Seville), (2005). In: Decision and Control, 2005 and 2005 European Control Conference. CDC-ECC '05. 44th IEEE Conference on, 2005. 0-7803-9567-0, 6146-6151. doi:10.1109/CDC.2005.1583145.
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Eye-hand coordination in a bimanual bounce juggling task.. Society for Neuroscience annual meeting 2004 (San Diego, CA, USA, du 23/10/2004 au 27/10/2004).
Ronsse, Renaud ; Lefèvre, Philippe ; Sepulchre, Rodolphe. Open-loop stabilization of 2D impact juggling. In: 6th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2004), Vol. 3, no. -, p. 1157-62 (2004). In: , Allgower, Frank: Stuttgart, Germany, 2004.
POST-UNIVERSITY CERTIFICATE Postuniversity certificate "CARAQA.be: Clinical, regulatory and quality affairs for medical devices and in-vitro diagnosis" |
For students willing to discuss topics related to my courses, please make an appointment.
General questions related to the lectures can be posted on the forums on Moodle.
Robotics
- Industrial Automation (LMECA2755) - Moodle
- Introduction to Robotics (LELME2732) - Moodle.
- Biorobotics (LMECA2335) - Moodle.
(Electro)mechanical design
- Project in Mechanical Design II (LMECA2840) - Moodle
- Project in Mechatronics (LELME2002) - Moodle - You can also visit the virtual museum...
Biomedical engineering
- Artificial organs and rehabilitation (LGBIO2114) - Moodle
- Industrial Project in Biomedical Engineering (LGBIO2220) - Moodle
Other classes, from the bachelor in engineering
- People management (gestion des personnes) (LEPL1805) - Moodle
- First project in engineering (Projet 1) (LEPL1501)
Learning units for 2024
| Label | Code |
|---|---|
| Project in mechatronics | LELME2002 |
| Robot modelling and control | LELME2732 |
| Project 1 | LEPL1501 |
| People management | LEPL1805 |
| Artificial organs and rehabilitation | LGBIO2114 |
| Industrial project in biomedical engineering | LGBIO2220 |
| Biorobotics | LMECA2335 |
| Industrial automation | LMECA2755 |
| Project in Mechanical Design II | LMECA2840 |
Current lab members
|  |
Former lab members
- Jeanne Evrard (PhD student, 2020-2025): Control, characterization, and validation of the Efficient Lockable Spring Ankle (ELSA) prosthesis
- François Heremans (FNRS PhD student, 2015-2019): Design and evaluation of a lightweight, low-cost and energy efficient active ankle prosthesis + (Post-doc, 2020-2024): energy efficient lower-limb prosthesis
- WangYu (visiting PhD student from School of Automation, Nanjing University of Science and Technology, 2023-2024): control of lower-limb rehabilitation devices
- Virginie Otlet (PhD student, 2019-2023): Gait rehabilitation with an active pelvis orthosis for patients with Parkinson's disease : model-based predictions and assessment of an adaptive framework
- Now "logisticienne de recherche" within the NMSK lab (UCLouvain)
- Victor Collognesi (FRIA PhD student, 2017-2022; Post-doc, 2022-2023): Modeling and simulation of bird flapping flight: control, wakes and formation / RevealFlight project - co-supervised with Philippe Chatelain
- Now post-doc in the group of Prof. Anders Hedenström (Lund, Sweden)
- Gianmarco Ducci (PhD student, 2018-2022): Stability of flapping flight dynamics of large birds / RevealFlight project - co-supervised with Philippe Chatelain
- Now post-doc
- Ali Al-Dabbagh (PhD student, 2019-2022): Visual-inertial prediction of terrain-specific human locomotion modes
- Gennaro Vitucci (post-doc, 2018-2021): non-linear dynamics of flying birds / RevealFlight project - co-supervised with Philippe Chatelain
- Now researcher at Politecnico di Bari (Bari, Italy)
- Caroline Bernier (PhD student, 2015-2021): Interactions between flow and actuated structures simulated through a Vortex Particle-Mesh method: application to swimming and energy harvesting devices - co-supervised with Philippe Chatelain
- Sophie Heins (PhD student, 2014-2021): Design and evaluation of bio-inspired control strategies for transfemoral prosthesis
- Hamed Rahimi Nohooji (post-doc, 2018-2019): dynamic motor primitives for locomotion
- Timothée Habra (PhD student, 2013-2017): Gaze stabilization of humanoid robots based on internal model
- Nicolas Van der Noot (FNRS PhD student, 2013-2017): Rich and robust bio-inspired locomotion control for humanoid robots - co-supervised with Auke Ijspeert (EPFL)
- Patricia Leconte (FRIA PhD student, 2012-2017): Robotic assessment and rehabilitation of rhythmic upper-limb movement primitives after stroke - co-supervised with Bruno Dehez
- Christophe Everarts (PhD student, 2011-2017): Design and study of a new continuously variable transmission with potential application to lower limb prosthesis - co-supervised with Bruno Dehez
- Virginia Ruiz Garate (PhD student, 2012-2016): Bio-inspired motor primitives for controlling leg exoskeletons - co-supervised with Paul Fisette
- Now researcher and lecturer at the Engineering Faculty of Mondragon Unibertsitatea (Bilbao, Spain)
- Alexandra Zobova (WBI post-doc, 2013-2014): locomotion in humanoid robotics
- Jean-François Collard (post-doc, 2011-2013): control and modeling of lower-limb rehabilitation robots
Interns hosted in the lab
Rachel Dias Carlson (MIT) - summer 2012; Vicky Biron (Ecole Polytechnique de Montréal) - summer 2013; Deron Browne (MIT) - summer 2015; Guilia Bernadette Creed (University of Surrey) - summer 2017; Gabrielle K. Enns (MIT) - summer 2018; Wendy Wang (MIT) - summer 2019; Carlos Salazar Briceño (Pontificia Universidad Católica del Perú) - 01-07/2020; Rémi Schuller (Polytech Sorbonne - Sorbonne Université) - summer 2020; James Doyle (The University of Melbourne) - 01-03/2025.